
Zobrazení: 100 Autor: HanZhen Xu Čas zveřejnění: 20. 6. 2025 Původ: místo
Úvod do těchto tří typů založených na jejich metodách řízení cívek: řízení s jednou cívkou, řízení se dvěma cívkami a řízení pomocí desky s úsporou energie (tj. ovládací deska PWM + ovládání jednou cívkou). Tento článek porovnává strukturu, princip činnosti a charakteristiky spotřeby energie stejnosměrných stykačů s metodami řízení s jednou, dvěma cívkami a PWM a analyzuje jejich výhody, nevýhody a použitelnost.
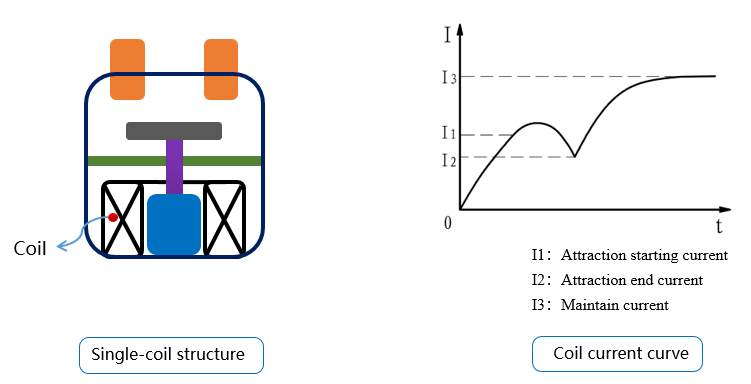
Mezi hlavní součásti jednocívkového DC stykače patří jediná cívka, pružinový resetovací mechanismus a kontaktní systém. Jeho pracovní princip spočívá v tom, že když je cívka nepřetržitě napájena, generuje se magnetické pole, které způsobí, že se kotva posune nahoru, čímž se pohyblivý kontakt přiblíží ke stacionárnímu kontaktu, normálně otevřený kontakt je připojen. Když je cívka bez napětí, elektromagnetická sací síla zmizí, což způsobí, že se pohyblivý kontakt vrátí do své původní polohy, takže normálně otevřený kontakt je odpojen.
Výkon a spotřeba energie stejnosměrných stykačů jako základní součást systémů řízení napájení přímo ovlivňují účinnost systému. Obecně lze DC stykače klasifikovat jako neporušené se stacionárním kontaktem. Po přerušení napájení se pružina resetuje a pohyblivý a pevný kontakt se oddělí. Hlavní nevýhody jednocívkových DC stykačů jsou následující:
① Obecně je spotřeba energie relativně vysoká, tj. P = I⊃2; * R (při plném proudu I = Us / R), takže nárůst teploty cívky jednocívkového DC stykače je obvykle nejvyšší.
② Když je řídicí obvod cívky jednocívkového stejnosměrného stykače bez napětí, vzniká velká zpětná elektromotorická síla. U stejnosměrných stykačů s řídicím napětím 12V DC nebo 24V DC budou v okamžiku odbuzení cívky generovány stovky voltů zpětného napětí. Běžným řešením je paralelní zapojení volnoběžné diody do obvodu ovládání cívky (tento způsob obvykle vede k delší době uvolnění hlavních kontaktů, když je stejnosměrný stykač bez napětí, proto se často paralelně s obvodem ovládání cívky používá TVS dioda nebo volnoběžná dioda v sérii se zenerovou diodou).
③ Rozsah provozního napětí cívky (Us) je malý, obecně 85 % Ue až 110 % Ue (Ue představuje jmenovité provozní napětí produktu).
Hlavními výhodami jednocívkových DC stykačů jsou nízké výrobní náklady a vysoká odolnost proti elektromagnetickému rušení (EMC).
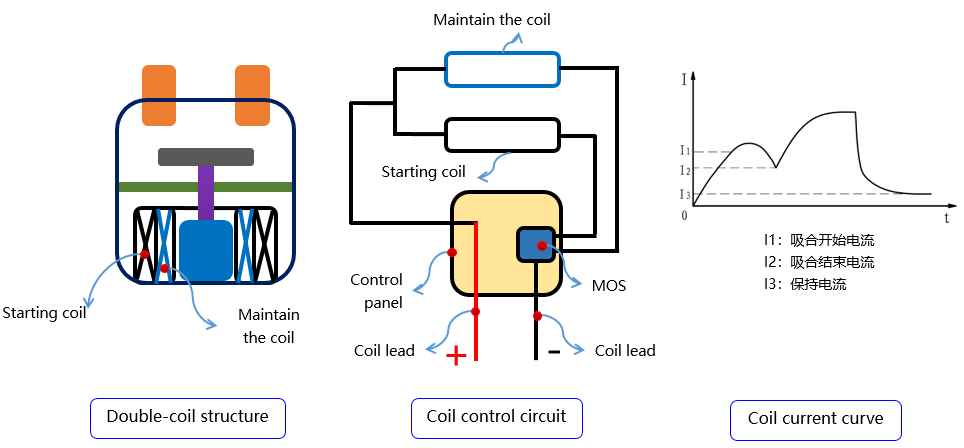
Hlavní struktura dvoucívkového stejnosměrného stykače se skládá ze spouštěcí cívky (vysoký proud), přídržné cívky (nízký proud), řídicí desky spínání obvodů, mechanismu pružinového resetu a kontaktního systému. Jeho pracovní princip spočívá v tom, že při prvním zapnutí cívky jsou startovací cívka a přídržná cívka zapojeny paralelně a současně napájeny, čímž se vytváří silné elektromagnetické pole pro poskytnutí dostatečné počáteční elektromagnetické síly, která trvá přibližně 130 ms. Poté řídicí deska přepínání obvodů odpojí spouštěcí cívku a ponechává pouze přídržnou cívku, aby nepřetržitě fungovala, a poskytuje vhodné magnetické pole pro udržení normálního uzavřeného stavu produktu. Hlavní nevýhody dvoucívkového DC stykače jsou následující:
① Startovací výkon je relativně vysoký, označovaný jako P_start, což vyžaduje napájecí zdroj s vysokou kapacitou.
② Výrobní cena dvoucívkového DC stykače je relativně vysoká, hlavně kvůli složitosti procesu montáže cívky a přidání řídicí desky přepínání obvodů.
③ Rozsah provozního napětí cívek (U_s) je malý, typicky se pohybuje od 85 % U_e do 110 % U_e (U_e představuje jmenovité provozní napětí produktu).
Hlavní výhodou dvoucívkového stejnosměrného stykače je, že spotřeba energie při nepřetržitém provozu cívek je nízká, označovaná jako P_hold, a nevzniká žádné významné zpětné napětí (které bylo potlačeno řídicí deskou přepínání obvodů).
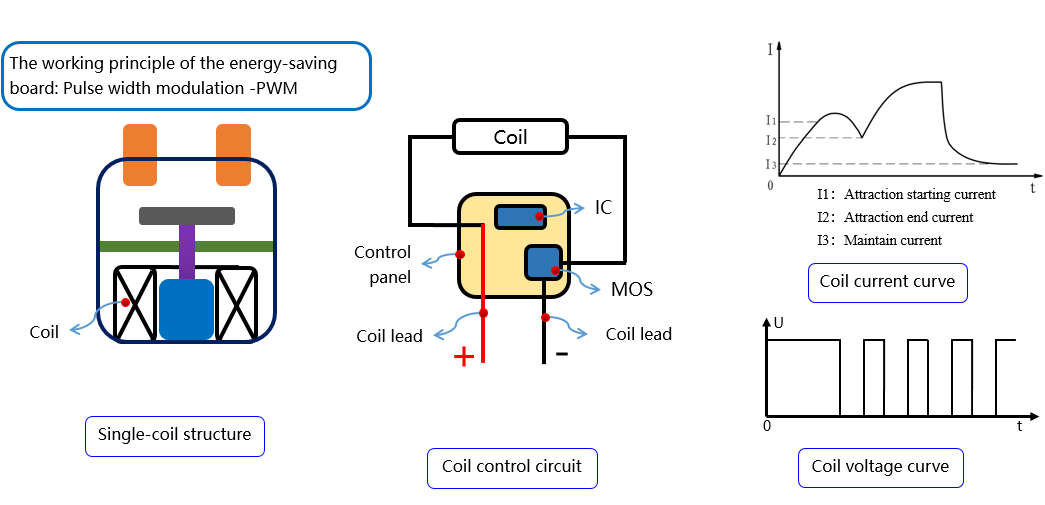
Hlavní konstrukční součásti stejnosměrného stykače desky pro úsporu energie zahrnují jedinou cívku, řídicí desku obvodu PWM, mechanismus pružinového resetu a kontaktní systém. Jeho pracovní princip spočívá v tom, že během fáze rozběhu je cívka napájena plným napětím (fáze rozběhu trvá přibližně 130 ms) a během fáze výdrže se proud snižuje úpravou pracovního cyklu napěťového výstupu (pulzní šířková modulace PWM). Hlavní nevýhody stejnosměrného stykače desky pro úsporu energie jsou následující:
① Spotřeba energie při spouštění je obecně vysoká, tj. Pstart (během fáze spouštění), takže energie zdroje potřebná pro použití je relativně velká.
② Výrobní cena stejnosměrného stykače energeticky úsporné desky je relativně vysoká, hlavně kvůli složitému zpracování sestavy cívky a přidání energeticky úsporné řídicí desky.
③ Schopnost anti-elektromagnetického rušení (EMC) je slabá, hlavně proto, že na energeticky úsporné řídicí desce je několik nových integrovaných obvodů a spoléhá se na ovládání softwarovým programem.
Hlavními výhodami stejnosměrného stykače desky pro úsporu energie je, že trvalá spotřeba energie produktu je extrémně nízká, tj. nárůst teploty cívky je nízký, rozsah pracovního napětí cívky je široký a nevzniká žádné významné zpětné napětí (které bylo potlačeno energeticky úspornou řídicí deskou).
V souhrnu jsou rozdíly mezi třemi různými metodami řízení cívek stejnosměrných stykačů shrnuty v následující tabulce,
Jednocívkové |
Dvoucívka |
Energeticky úsporná deska |
|
Startovací proud |
nízký |
vysoký |
vysoký |
Udržujte proud |
velký |
nízký |
nízký |
Udržujte elektromagnetickou sílu |
Beze změny |
Zmenšit se |
Beze změny |
Rozsah provozního napětí cívky |
85%-110% USA |
85%-110% USA |
宽电压 |
Nárůst teploty cívky |
vysoký |
nízký |
nízký |
Polarita cívky |
Nepolarita |
polarita |
polarita |
Reverzní elektromotorická síla |
Ano |
Žádný |
Žádný |
